Electric Drive Solutions for Excavator Applications
Electrifying excavators requires a system-level approach that addresses multiple actuators, highly dynamic load profiles, and demanding duty cycles.
Unlike on-road vehicles, excavators operate with frequent transients, overload conditions, and simultaneous actuation of driving and working functions.
Synwyn Dynamics provides application-driven electric drive solutions for excavators, focusing on system architecture, functional requirements, and integration robustness rather than isolated component replacement.
Excavator Functional Architecture
A typical electrified excavator consists of several key functional subsystems:
• Traction drive for machine movement
• Swing drive for upper structure rotation
• Hydraulic pump drive for working functions
• Auxiliary systems for cooling, steering, and accessories
Each function exhibits distinct torque, speed, and duty-cycle characteristics, requiring differentiated electric drive configurations within a unified system architecture.
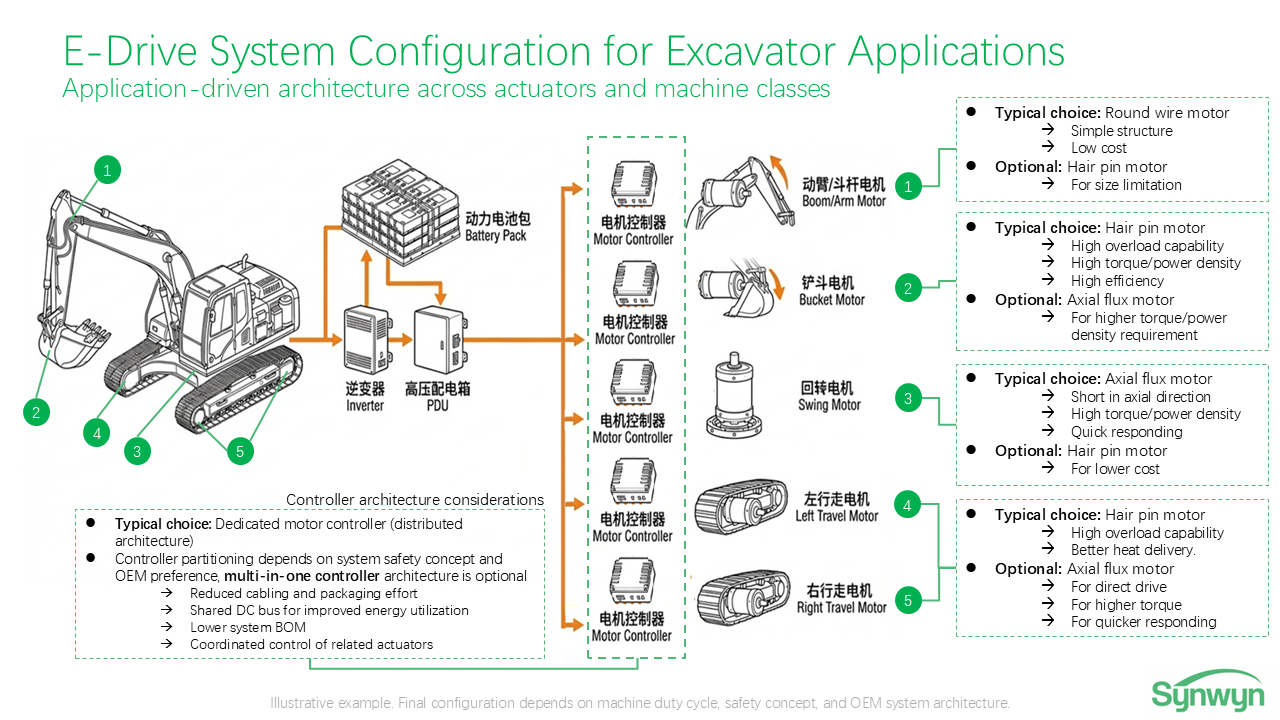
E-Drive System Configuration for Excavator Applications
This diagram illustrates a reference electric drive system architecture for excavator applications, highlighting actuator functions, motor topology options, and controller architecture considerations at system level.
System-Level Design Considerations
Function-Oriented Drive Configuration
Electric motors and controllers are configured according to the specific demands of each actuator, balancing torque density, overload capability, efficiency, and controllability.
Architecture and Control Strategy
Key architecture decisions include:
• Centralized versus distributed motor control
• Coordination between traction, swing, and hydraulic systems
• Power distribution and energy flow management
These decisions strongly influence system performance, reliability, and overall efficiency.
Thermal and Reliability Focus
Excavators often operate under sustained high load and harsh environmental conditions.
Thermal stability, component protection, and fault-tolerant behavior are therefore essential design considerations at system level.
Solution Scope
Typical Solution Elements
• Electric drive architectures for traction and swing systems
• Electrified hydraulic pump drives
• Coordinated multi-motor control strategies
• Scalable system configurations for different machine sizes
Solutions are defined as reference architectures and configurations, with final implementation adapted to specific machine platforms and operating profiles.
From Reference Architecture to Project Implementation
Excavator solutions range from recommended system architectures to project-specific implementations and validated case studies, supporting OEMs and integrators from early concept stages through to industrialization.
In excavator electrification, system architecture defines performance long before component selection begins.

