E-Drive System Configuration for Mining Truck Applications
Application Context
Mining trucks operate under some of the most demanding duty cycles in off-highway electrification.
Unlike intermittent construction equipment, mining vehicles often run under continuous or near-continuous load, with limited cooling opportunities and extreme environmental conditions.
Electrification success in mining applications is therefore not defined by peak power, but by thermal robustness, reliability, and long-term system stability.
⸻
Key Operating Characteristics
Typical mining truck operating conditions include:
• Near S1 continuous duty traction operation
• High sustained torque at low to medium speeds
• Elevated ambient temperatures, dust, vibration, and shock
• Long operating hours with minimal unplanned downtime tolerance
• Strong emphasis on maintainability and lifecycle cost
These conditions place system-level constraints that directly shape e-drive architecture choices.
⸻
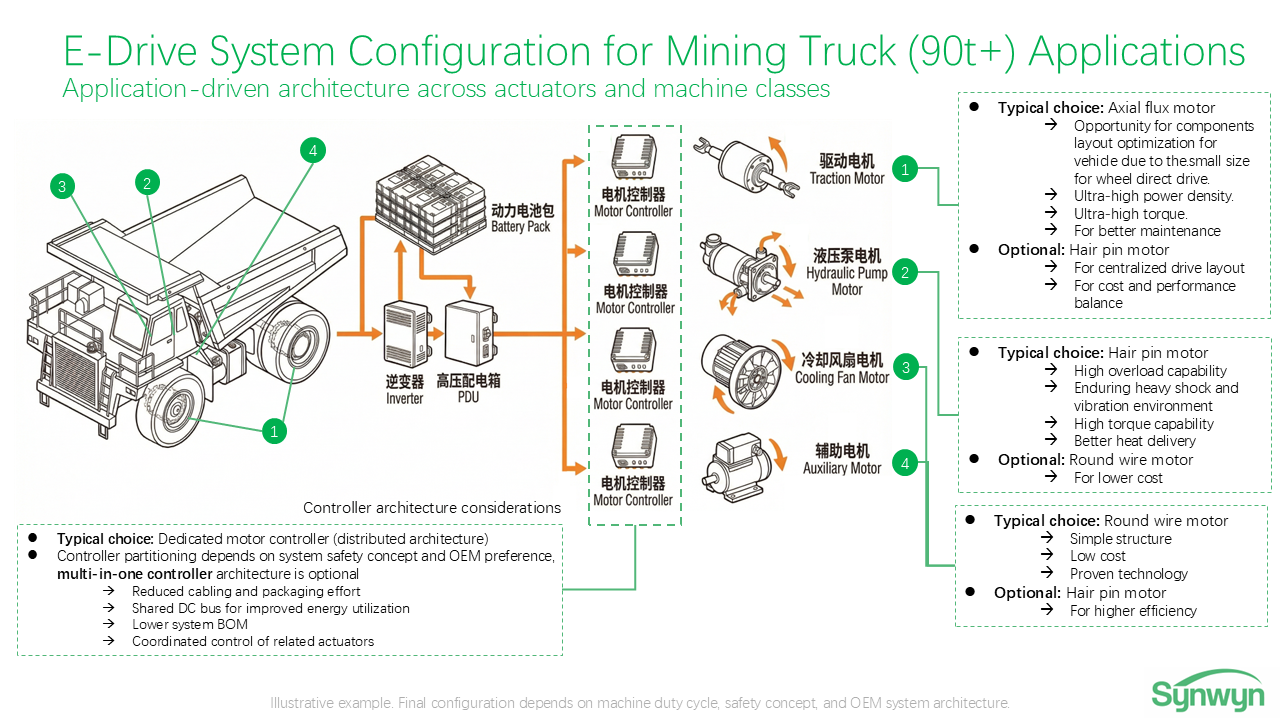
E-Drive System Configuration for Mining Truck ApplicationsThe following diagram illustrates a reference electric drive system configuration for mining truck applications.
It highlights typical traction functions, thermal management considerations, and controller architecture at system level under continuous-duty operating conditions.
Final system configuration may vary depending on vehicle class, duty cycle definition, environmental conditions, and OEM system architecture.
⸻
Application-Driven E-Drive Architecture
At Synwyn Dynamics, mining truck e-drive systems are configured starting from duty cycle and reliability targets, not from predefined motor products.
A typical system architecture considers:
• Traction system design
Focus on continuous torque capability, predictable thermal behavior, and derating characteristics under sustained load.
• Cooling strategy
Liquid or oil-based cooling concepts are evaluated early, as thermal limits often define achievable performance envelopes.
• Motor topology selection
Motor architectures are selected based on thermal efficiency, robustness, and integration feasibility rather than maximum power density alone.
• Gearbox and drivetrain integration
Mechanical simplicity and proven layouts are prioritized to support uptime and serviceability.
• Controller architecture
Control strategies emphasize thermal protection, fault tolerance, and stable long-term operation over aggressive dynamic tuning.
⸻
System-Level Trade-Offs
Mining truck electrification involves balancing several competing factors:
• Continuous performance vs. peak capability
• Thermal margin vs. packaging constraints
• Efficiency vs. robustness
• System complexity vs. maintainability
There is no one-size-fits-all solution.
Final architecture decisions are always driven by OEM vehicle layout, duty cycle definition, safety concept, and lifecycle expectations.
⸻
Synwyn Approach
Synwyn Dynamics acts as a system-level e-drive engineering partner, supporting OEMs and integrators in:
• Translating mining duty cycles into realistic performance envelopes
• Defining motor, controller, and cooling concepts at system level
• Evaluating architecture trade-offs early in the design phase
• Aligning e-drive solutions with reliability and total cost of ownership targets
Our focus is not component substitution, but architecture definition that survives real mining conditions.
⸻
Typical Application Scope
• Rigid mining trucks
• Underground mining vehicles
• Heavy haulage and material transport platforms
⸻
In mining electrification, reliability and thermal margins are often the true measures of performance.
⸻

